카메라 캘리브레이션
3차원의 장면이 카메라를 통해 2차원의 평면으로 구현될 때, 각각의 3차원 상의 점들은 카메라의 위치, 방향 같은 기하학적인 요소와 이미지 센서의 초점 거리, 렌즈의 왜곡 등 여러 내부적인 요소(parameters) 들에 의해 결정된다. 이 내부 요소들을 통해 렌즈의 왜곡, 3D상의 물체에 대한 크기 및 면적, 카메라의 위치등을 계산할 수 있으며, 이 값들을 구하는 과정을 카메라 캘리브레이션 이라고 부른다.
좌표계
좌표계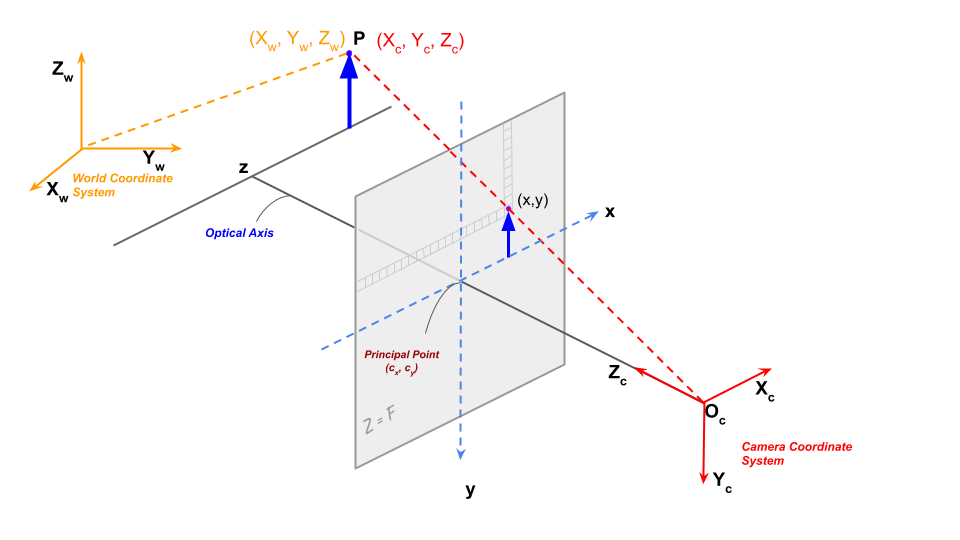
카메라 캘리브레이션에서는 주로 4가지의 좌표계가 사용된다
- 월드 좌표계 (3D)
- 픽셀 좌표계
- 정규 좌표계
- 카메라 좌표계
월드 좌표계
사물의 위치를 나타내는 좌표계로 3차원(X,Y,Z)을 사용하는 좌표계이다. 목표로 하는 사물의 위치를 기준으로 잡아 사용할 수 있으며, X축 Y축 또한 기준 원점을 어디로 삼느냐에 따라 달라질 수 있다.
$$ P = (X,Y,Z) $$
카메라 좌표계
월드 좌표계와 비슷하지만 어떤 공간상의 한 지점이 아닌 카메라의 광학축을 기준으로 한 3차원 좌표계이다. 카메라 렌즈의 정면 방향을 Z축, 카메라 렌즈의 아래쪽이 Y축, 렌즈의 오른쪽 방향을 X축으로 잡는다. 월드 좌표계와 동일한 단위(unit)을 사용해야 한다.
$$ P_c = (X_c,Y_c,Z_c) $$
영상 좌표계 (Image coordinate)
영상에서 사용하는 좌표계로, 이미지의 좌상단을 원점으로 오른쪽 방향이 x축, 아래쪽이 y축인 2차원 좌표계이다. 월드 좌표계의 한 점 P 는 영상 좌표계 평면의 한 점 p 로 투영된다.
$$ p_i = (x,y) $$
정규 좌표계 (Normalized Image coordinate)
카메라 parameter의 영향을 받지 않는 정규화된 이미지 좌표계로, 카메라의 초점거리가(f) 1인 가상의 이미지 좌표계를 뜻한다. 이상적인 카메라 모델인 핀홀 카메라 모델 이 정의하는 좌표계와 같다. 각 카메라간의 서로 다른 parameter들의 종속성을 없애기 위해, 불필요한 요소가 제거된 정규화된 이미지 평면 좌표계를 사용한다.
$$ p_n = (u,v) $$